今年过年期间,科技企业表现亮眼,宇树科技便是其中之一。在春晚上其机器人大放异彩后,紧接着英伟达、卡内基梅隆大学团队借助宇树G1带来新项目——拿机器人复刻科比等经典动作。

从后仰跳投到霸王步,再到“NBA大使”的经典铁山靠,机器人都能模仿。然而,若只是简单复刻,并非真正的科技亮点。实际上,此次展示暗藏机器人训练技术的重大突破。
先来了解当下机器人的训练方式。机器人运行依赖算法,要让机器人学会打篮球,传统方法是先测量其关节扭矩、连杆质量分布等数据,接着进行动力学建模,即在电脑模拟其运动,这一过程需人工调整如手臂力量、投篮角度等参数,专业领域称之为系统识别(SysID)。
但系统识别存在问题,参数调整耗时费力,且在模拟器调好的参数,在现实中未必适用,虚拟与现实的参数维度差异大,导致传统SysID训练出的机器人在真实场景表现不佳。
于是,科学家尝试新方法——域随机化(DR),将机器人置于各种极端条件下让其自行迭代寻找最优策略。但这种方法如同“盲人摸象”,机器人难总结规律,动作也会因求稳而保守、不灵活。

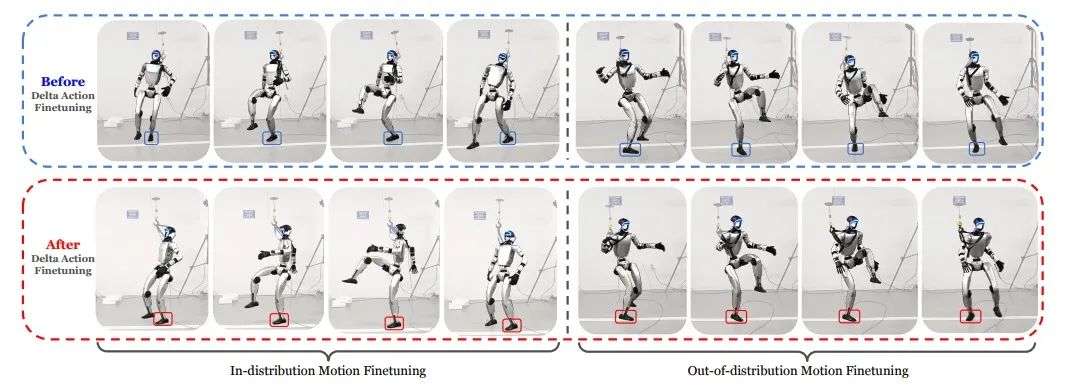
而宇树科技此次采用的ASAP(Aligning Simulation and RealPhysics,对齐模拟与真实物理框架)技术带来新突破。该技术先利用处理后的人类运动数据在仿真环境训练基于相位的运动跟踪策略,再通过强化学习训练残差动作模型补偿仿真与现实的差异。
ASAP框架分两步。第一步是给机器人打基础、搞模拟预习,通过下载含人类动作的视频,利用TRAM运动重建工具将动作转换成三维轨迹,在虚拟环境训练机器人精确模仿动作数据。

第二步则是在现实中校正,机器人在真实球场时,工程师利用传感器收集数据,与虚拟训练数据对比,用强化学习构建残差(delta)动作模型,微调参数后,机器人就能实现敏捷流畅运动。
ASAP框架结合现实与虚拟训练,缩短训练时长且提升效果。此前英伟达的Cosmos平台也有类似操作,将现实物理现象搬到电脑模拟,对机器人、AI、自动驾驶等意义重大。
此外,该论文主要作者之一是B站up主何泰然,儿时梦想是造《铁甲钢拳》里的机器人,如今将梦想照进现实。


 鄂公网安备42010402001699号
鄂公网安备42010402001699号