如今,人形机器人领域迎来重大突破。CMU和英伟达的华人研究团队提出的ASAP模型,让机器人的表现令人惊叹。
瞧,机器人版科比、詹皇、C罗现身。「科比」后仰跳投,「C罗」和「詹姆斯」展示招牌庆祝动作。不仅如此,该机器人还会侧跳、前跳、前踢、右踢,能完成深蹲、腿部拉伸等高难度动作,甚至会跳APT舞。

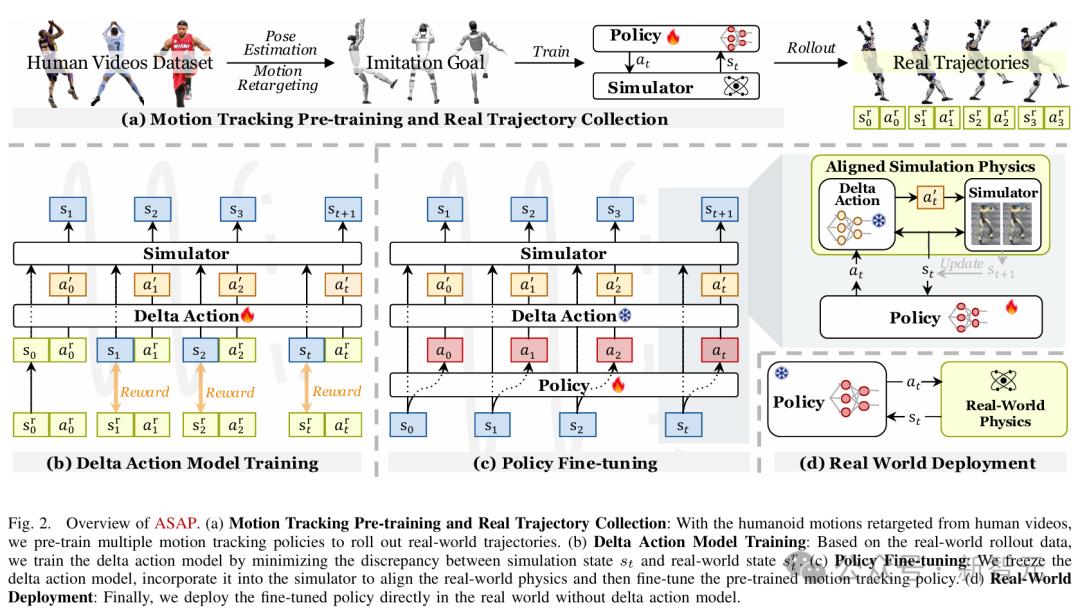
一直以来,sim2real在机器人仿真评估中广泛应用,但存在繁琐动作微调难题。而ASAP模型采用「real2sim2real」方法,打破这一困境。
ASAP模型包含预训练和后训练两大阶段。预训练阶段,以真人运动视频为数据来源,在仿真环境训练动作跟踪策略。后训练阶段,收集真实世界运行数据,训练delta动作模型,补偿偏差,微调预训练策略,使其更好适应真实物理环境。
研究人员针对策略迁移进行实验,回答了三个问题。结果显示,ASAP在补偿动力学失配、策略微调、sim2real迁移方面均表现出色,优于多种基线方法,减少动力学不匹配问题,降低运动跟踪误差。
此外,研究人员还分析了ASAP的相关问题,如增量动作模型的训练和使用方法等。
这项研究提出ASAP框架,缩小仿真与现实差距,在真实环境部署全身控制策略,开发并开源多仿真器训练与评估代码库,为人形机器人发展指明方向。
© 版权声明
文章版权归作者所有,未经允许请勿转载。

AI工具箱,全方位AI资源聚合平台,精选全球3000+优质免费AI应用,涵盖ppt生成, AI写作、AI编程、AI绘画、AI设计、AI论文、AI视频、AI配音、AI音乐、AI金融等多个领域领域的AI工具软件。包含扣子、扣子空间、DeepSeek、Gamma等热门AI工具。致力于让AI技术触手可及,助力用户高效工作,加速技术创新与产业应用落地,推动人工智能应用革新。

 鄂公网安备42010402001699号
鄂公网安备42010402001699号